Intro to ConcurrentHashMap
Java 提供了不同层面的线程安全支持。在传统集合框架内部,除了 Hashtable 等容器,还提供了同步包装器(Synchronized Wrapper),我们可以通过 Collections 工具类提供的包装方法来获取同步包装器,如 Collections.synchronizedMap,但是它们利用的都是粗粒度的同步方式,在高并发情况下,性能比较底下。
除了同步包装器,我们更加普遍的选择是使用并发包(java.util.concurrent)提供的线程容器类:
- 并发容器,如 ConcurrentHashMap、CopyOnWriteArrayList
- 线程安全队列,如 ArrayBlockingQueue、SynchronousQueue。
- 各种有序容器的线程安全版本等。
为什么需要 ConcurrentHashMap
Hashtable 本身比较低效,因为它的实现基本就是将 put、get、size 等各种方法加上 synchronized 关键字。简单来说,这就导致了所有并发操作都要竞争同一把锁,一个线程在进行同步操作时,其他线程只能等待,大大降低了并发操作的效率。
前面提到的 HashMap 不是线程安全的,并发情况会导致类似 CPU 占用 100% 等一些问题,那么能不能利用 Collections 提供的 Synchronized Wrapper 来解决问题呢?
我们可以看下 SynchronizedMap 的实现,虽然所有操作不声明为 synchronized 方法,但还是利用了 this 作为互斥的 mutex,这种版本不适合高并发的场景。
private static class SynchronizedMap<K,V> implements Map<K,V>, Serializable {
private final Map<K,V> m; // Backing Map
final Object mutex; // Object on which to synchronize
// …
public int size() {
synchronized (mutex) {return m.size();}
}
// …
}
我们再来看看 ConcurrentHashMap 是如何设计实现的,为什么它能大大提高并发效率。
实际上 ConcurrentHashMap 的设计实现一直在演化,这里我们基于 JDK8 和之前的版本做比较。
JDK7 ConcurrentHashMap 的实现 基于
- 分离锁,也就是将内部进行分段(Segment),里面则是 HashEntry 的数组,和 HashMap 类似,hash 相同的条目也是以链表形式存放。
- HashEntry 内部使用 volatile 的 value 字段来保证可见性,也利用了不可变的机制以改进利用 Unsafe 提供的底层能力,如 volatile access,去直接完成部分操作,以优化性能。
static final class HashEntry<K,V> {
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;
...
}
JDK7 中 ConcurrentHashMap 的结构图
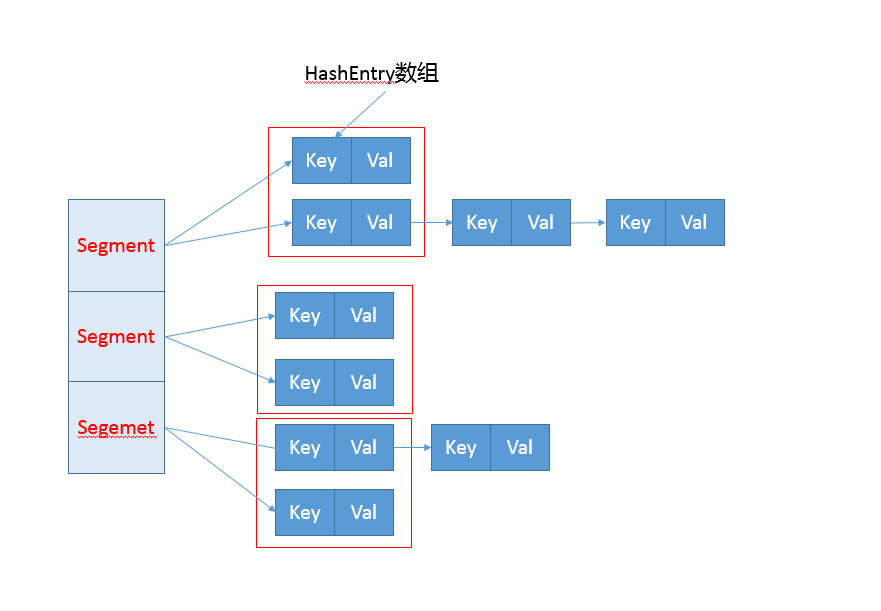
其核心是利用分段设计,在进行并发操作的时候,只需要锁定相应段,这样就有效避免了类似 Hashtable 整体同步的问题,大大提高了性能。
Segment 由 concurrencyLevel,默认值(DEFAULT_CONCURRENCY_LEVEL)是 16,concurrencyLevel 也可以在构造函数里指定。
可以看看 JDK7 里 ConcurrentHashMap 的 get 方法。
public V get(Object key) {
Segment<K,V> s; // manually integrate access methods to reduce overhead
HashEntry<K,V>[] tab;
int h = hash(key.hashCode());
//利用位操作替换普通数学运算
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
// 以Segment为单位,进行定位
// 利用Unsafe直接进行volatile access
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null &&
(tab = s.table) != null) {
//省略
}
return null;
}
对于 put 操作,首先是通过二次 hash 避免哈希冲突,然后以 Unsafe 调用方式,直接获取相应的 Segment,然后进行线程安全的 put 操作:
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
// 二次哈希,以保证数据的分散性,避免哈希冲突
int hash = hash(key.hashCode());
int j = (hash >>> segmentShift) & segmentMask;
if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck
(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
s = ensureSegment(j);
// 在 Segment 中进行 put 操作
return s.put(key, hash, value, false);
}
其核心逻辑实现在下面的内部方法中:
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// scanAndLockForPut 会去查找是否有 key 相同 Node
// 无论如何,确保获取锁
HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry<K,V>[] tab = table;
int index = (tab.length - 1) & hash;
HashEntry<K,V> first = entryAt(tab, index);
for (HashEntry<K,V> e = first;;) {
if (e != null) {
K k;
// 更新已有 value...
}
else {
// 放置 HashEntry 到特定位置,如果超过阈值,进行rehash
// ...
}
}
} finally {
unlock();
}
return oldValue;
}
从上面的源码可以看出,在进行并发写操作时:
- ConcurrentHashMap 会获取重入锁,以保证数据一致性,Segment 本身就扩展实现自 ReentrantLock,所以在并发修改期间,相应的 Segment 会被锁定。
- 在最初阶段,进行重复性的扫描,以确定相应 key 值是否已经在数组里面,进而决定是更新还是放置操作。
- 和 HashMap 扩容不同,ConcurrentHashMap 不是整体的扩容,而是单独对 Segment 进行扩容。
ConcurrentHashMap 还有个 size 方法,它的实现涉及分离锁的一个副作用。
试想,如果不进行同步,简单的计算所有 Segment 的总值,可能会因为并发 put,导致结果不准确,但是直接锁定所有 Segment 进行计算,就会变得非常昂贵。其实,分离锁也限制了 Map 的初始化等操作。
所以,ConcurrentHashMap 的实现是通过重试机制(RETRIES_BEFORE_LOCK,指定重试次数 2),来试图获得可靠值。如果没有监控到发生变化(通过对比 Segment.modCount),就直接返回,否则获取锁进行操作。
Java8 版本中,ConcurrentHashMap 有哪些变化呢?
- 总体结构上,它的内部存储和 HashMap 结构非常相似,同样是以 bucket 数组,然后内部也是一个个所谓的链表结构(bin),同步的粒度更细致一些。
- 其内部仍有 Segment 定义,但仅为了保证序列化的兼容性,不再有任何结构上的用处。
- 因为不再使用 Segment,初始化操作大大简化,修改为 lazy load 模式,这样可以有效避免初始化开销。
- 数据存储利用 volatile 来保证可见性。
- 使用 CAS 等操作,在特定场景进行无锁并发操作。
- 使用 Unsafe、LongAdder 等底层手段,进行极端情况优化。
存储实现为 Node<K, V>,和 HashMap 比较类似,不同点是 ConcurrentHashMap 里 value 和 next Node 都声明为 volatile,保证可见性。
static class Node<K,V> implements Map.Entry<K,V> {
final int hash;
final K key;
volatile V val;
volatile Node<K,V> next;
// ...
}
我们看看 get 方法的实现
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode());
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
// 初始化操作
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
// Bin 为空时,利用 CAS 进行无锁线程安全操作
if (casTabAt(tab, i, null, new Node<K,V>(hash, key, value, null)))
break;
}
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
synchronized (f) {
// 细粒度同步修改操作
if (tabAt(tab, i) == f) {
if (fh >= 0) {
// ...
}
else if (f instanceof TreeBin) {
// ...
}
else if (f instanceof ReservationNode)
throw new IllegalStateException("Recursive update");
}
}
// Bin 超过阀值,进行树化
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
addCount(1L, binCount);
return null;
}
这里同步使用了 synchronized 关键字,为何没用通常建议的 ReentrantLock 呢,这是因为现代 JDK 中,synchronized 已被不断优化,可以不再担心性能差异,而且相较于 ReentrantLock,synchronized 可以减少内存消耗。
tabAt 的实现直接利用了 Unsafe.getObjectAcquire 进行优化,避免间接调用的开销。
/*
* Volatile access methods are used for table elements as well as
* elements of in-progress next table while resizing. All uses of
* the tab arguments must be null checked by callers. All callers
* also paranoically precheck that tab's length is not zero (or an
* equivalent check), thus ensuring that any index argument taking
* the form of a hash value anded with (length - 1) is a valid
* index. Note that, to be correct wrt arbitrary concurrency
* errors by users, these checks must operate on local variables,
* which accounts for some odd-looking inline assignments below.
* Note that calls to setTabAt always occur within locked regions,
* and so in principle require only release ordering, not
* full volatile semantics, but are currently coded as volatile
* writes to be conservative.
*/
static final <K,V> Node<K,V> tabAt(Node<K,V>[] tab, int i) {
return (Node<K,V>)U.getObjectVolatile(tab, ((long)i << ASHIFT) + ABASE);
}
初始化操作在 initTable 中,这是一个典型的 CAS 使用场景,利用 volatile 的 sizeCtl 作为互斥手段:如果发现竞争性的初始化,就 spin 在那里,等待条件恢复;否则利用 CAS 设置排他标志。如果成功则进行初始化,否则重试。
/**
* Initializes table, using the size recorded in sizeCtl.
*/
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
// 如果有冲突,进行 spin 等待
if ((sc = sizeCtl) < 0)
Thread.yield(); // lost initialization race; just spin
// CAS 成功返回 true,进入初始化逻辑
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = tab = nt;
sc = n - (n >>> 2);
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}
再看看,size 的操作,最终的实现逻辑是在 sumCount 方法中:
final long sumCount() {
CounterCell[] as = counterCells; CounterCell a;
long sum = baseCount;
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
而 CounterCell 的实现为:
static final class CounterCell {
volatile long value;
CounterCell(long x) { value = x; }
}
对于 CounterCell 的操作,是基于 java.util.concurrent.atomic.LongAdder 进行的,是一种 JVM 利用空间换取更高效率的方法,利用了Striped64内部的复杂逻辑。这个东西非常小众,大多数情况下,建议还是使用 AtomicLong,足以满足绝大部分应用的性能需求。